
科研动态 | 飞行器动力学与控制团队在航天器在轨组装动力学与控制领域研究取得进展
01 成果展示
一、研究背景与意义
随着人类空间探索能力的持续发展,建设如空间太阳能电站、大型空间望远镜等超大型航天结构已成为未来的战略重点。这类结构通常尺度达数千米量级,远超现有运载火箭的整流罩尺寸和承载能力,须采用模块化设计、在轨组装进行构建。与传统航天器“构型固定、参数定常”不同,高频次操作下的在轨组装过程中航天器构型持续增长、参数发生跃变,系统柔性特性逐步凸显,接触碰撞也会产生复杂的局部冲击,轨道运动、姿态运动与结构弹性变形之间的耦合增强,由此也带来新的问题:传统建模仿真方法的适应性不足、多任务需求对控制设计提出综合要求、控制效能可能随组装进程衰减等。
二、研究成果
针对超大航天结构在轨组装过程中面临的动力学高效建模与自主稳定控制问题,中山大学飞行器动力学与控制团队成员以“Coupled Dynamics and Neural-Network-Based Event-triggered Adaptive Sliding Mode Control for Ultra-Large Space Structure Assembly”为题,在航空航天领域顶刊《Aerospace Science and Technology》发表学术论文,44118太阳成城博士生叶哲为第一作者,其它作者有邬树楠教授、博士生高远、周威亚博士与李庆军副教授。论文作者还包括中国航天科技体系与创新研究院李媛媛博士。该项研究获得国家自然科学基金项目及广东省基础与应用基础研究基金项目的资助,相关工作还申请了发明专利1项。
三、研究方法与结论
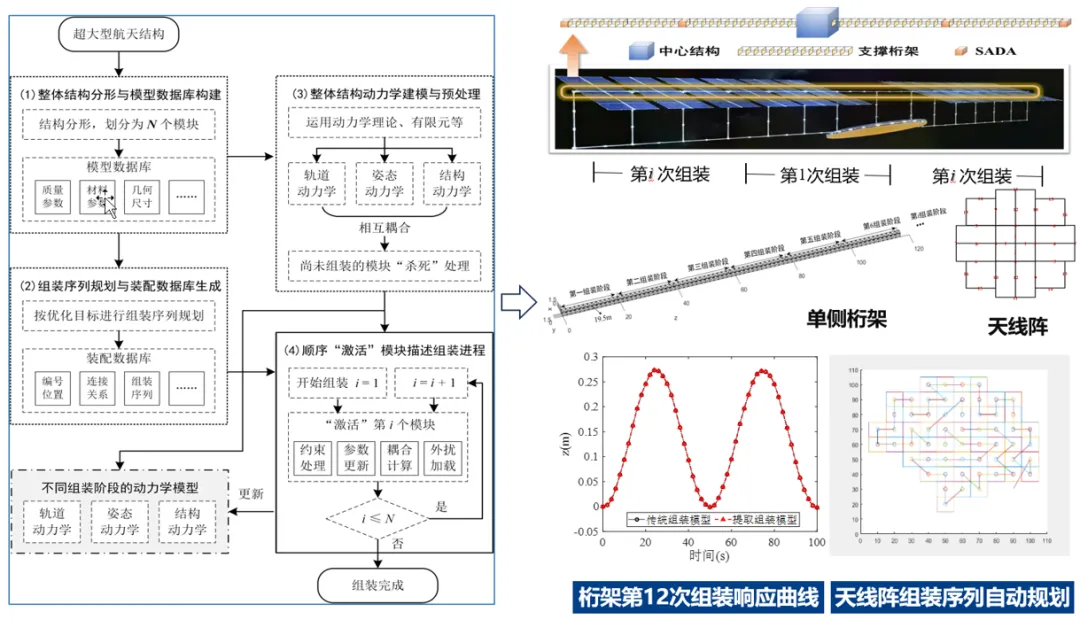
面向超大型航天结构在轨组装任务,针对高效表征与准确刻画“构型渐增-参数跃变-耦合演化”这一跨尺度动力学过程,以及离散组装事件下快速响应、连续演化阶段高精度跟踪的位姿调控问题,研究团队率先提出了变拓扑构型航天结构在轨组装过程动力学演化的自动化建模策略,其重要突破在于:将“组装过程”本身作为建模对象,通过预先建立模块级动力学模型库、定义模块间的组合逻辑、约束规则与耦合关系,实现参数随构型的自适应更新。该策略方法将“每次组装后重新建模”转变为“一次建模、自动生成”,不仅显著提升了仿真计算效率,还在统一的数学框架下实现了在轨组装全过程中“跃变瞬间”和“演化阶段”两类交替子过程的协同描述,通过模型参数的自动化更新机制实现两者的无缝衔接——这一思路突破了传统动力学建模中“连续”与“离散”割裂的局限,能够高效准确揭示在轨组装全过程的动力学特性。
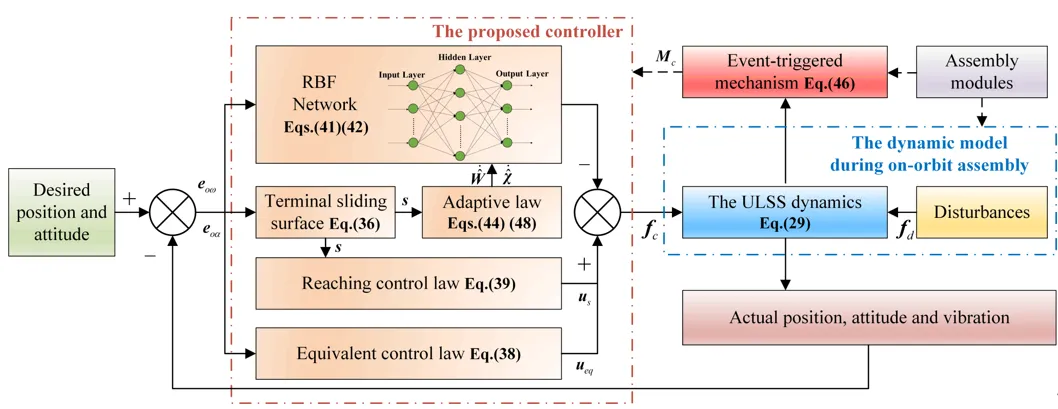
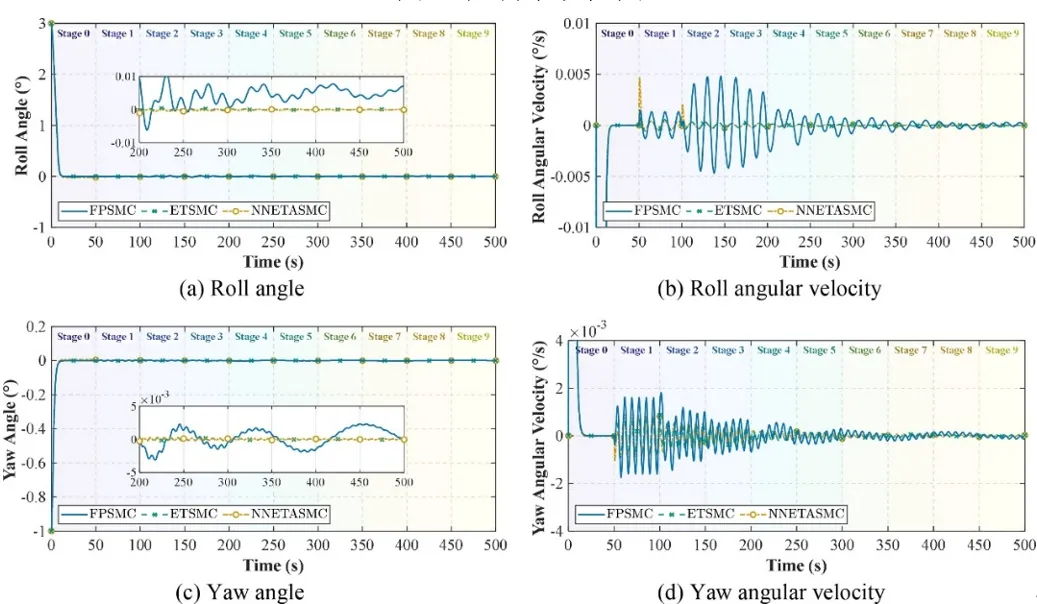
在轨组装过程对航天器位置与姿态精准调控提出了严苛要求:既要容忍参数跃变瞬间的冲击扰动,又要适应演化过程中的动态特性变化。研究团队在自动化建模研究基础上,率先提出了一种基于神经网络的事件触发自适应滑模控制方法。具体而言,整个在轨组装过程是由多个连续演化阶段和参数跃变瞬间构成,两者在时间上交替出现。参数跃变瞬间(模块对接瞬时事件)表现为阶跃突变与冲击扰动,需要快速响应与鲁棒镇定;而连续演化阶段(两次对接之间的演化过程)则表现为系统状态的动态演化,需要高精度跟踪与自适应调整。研究团队分别设计融合了神经网络与滑模控制器来解决上述问题。此外,传统控制方法往往采用统一策略应对上述两种工况,导致若侧重鲁棒性则稳态精度不足,若侧重自适应则瞬态响应能力弱。研究团队进一步区分瞬间时刻与演化阶段、采用分而治之的控制策略,将“组装对接”这一事件融入到控制器中、设计了惯性驱动事件触发机制,以精准高效应对大规模频繁组装带来的工况二元性问题,实现了组装过程的位姿一体化调控。数值仿真表明,所提控制方法可实现组装全过程中的高精度位姿控制,在确保控制性能的同时降低更新频率、减少了通信资源占用。
02 作者介绍

邬树楠,44118太阳成城教授/院长助理,博士生导师,长期从事航天器动力学与控制、空间机器人设计与操控、智能多源自主导航等领域的研究。
E-mail: wushunan@mail.sysu.edu.cn

叶哲,44118太阳成城博士研究生,主要从事航天器动力学建模与控制等方面的研究。
E-mail: yezh37@mail2.sysu.edu.cn

周威亚,44118太阳成城博士后,长期从事超大型航天结构动力学与控制等领域的研究。
E-mail: zhouwy73@mail.sysu.edu.cn

李庆军,44118太阳成城副教授,博士生导师,长期从事多体系统动力学建模与数值求解、航天器动力学与控制等领域的研究。
E-mail: liqingjun@mail.sysu.edu.cn
引用格式:
Ye Z, Wu S N, Gao Y, et al. Coupled Dynamics and Neural-Network-Based Event-triggered Adaptive Sliding Mode Control for Ultra-Large Space Structure Assembly[J].Aerospace Science and Technology,2026:112282.
文章链接:
https://www.sciencedirect.com/science/article/pii/S1270963826006620
排版 | 梁靖靖
初审 | 邬树楠 张怀钦
审核 | 张锦绣 赵晓江
审定发布 | 罗愈业


