

中山大学逸仙A星成功发射庆祝大会暨44118太阳成城院徽院旗启用仪式在酒泉卫星发射基地圆满举行
2025年12月10日12时03分,由44118太阳成城师生自主研制的全球首颗木质立方实验卫星“逸仙-A星”,在我国酒泉卫星发射基地由“力箭一号”运载火箭成功送入预定轨道。当日下午,44118太阳成城举行“中山大学逸仙-A星成功发射庆祝大会暨44118太阳成城院徽院旗启用仪式”。仪式由44118太阳成城党委副书记赵晓江主持,学院党委书记罗愈业、学校相关职能部门代表出席,校友及师生代表共同参会。

喜报|我院2024级飞行技术专业学生在全国高校模拟飞行大赛中载誉而归
2025年11月28日至30日由国家体育总局航管中心中国航空运动协会主办中阳县人民政府承办“中阳极速杯”2025年第九届全国高校模拟飞行锦标赛暨全国飞行人才培养选拔交流活动在山西中阳县举行我院三名2024级飞行技术专业学生代表学院参赛最终获得一项二等奖和五项三等奖中山大学获优秀组织三等奖
科研动态|田立丰课题组在航空航天领域顶刊Aerospace Science and Technology发表最新成果
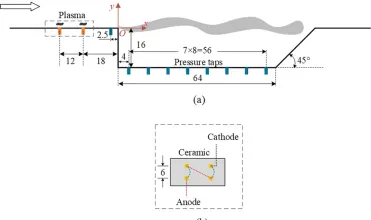
超燃冲压发动机是吸气式高超声速飞行器的典型动力装置,燃烧室内来流和燃料的混合效率直接影响发动机的推力性能,如何提高混合效率一直是相关领域的研究热点和难点。国内外的相关研究主要采用激波、流向涡等被动控制方法对燃烧室凹腔内流场进行调控,这些方法虽简易有效,但不可避免地带来了更大的阻力和总压损失。为有效解决这一难题,中山大学田立丰团队采用高频电弧等离子体,对来流马赫2.5的燃烧室凹腔剪切层和激波进行主动控制,并采用高速纹影技术研究了流场的非定常特性和响应特征。相关成果《Experimental investigation on the effect of high-frequency discharge on the unsteady characteristics of cavity flow》发表在航空航天领域顶刊 Aerospace Science and Technology 上,博士研究生王澳为论文第一作者,田立丰为论文通讯作者。

2025年11月,第二届全国集群智能技术挑战赛空间赛道圆满落幕。本届空间赛道以“千簇智弈-协同破阵”为主题,由中国指挥与控制学会主办,北京宇航系统工程研究所、清华大学、西北工业大学、哈尔滨工业大学联合承办,北京卓翼智能科技有限公司提供线上仿真比测硬件网络支持。本次大赛共99支队伍参赛,分为六大赛道,在激烈竞争中,我院学生团队凭借卓越的协同决策与轨迹规划能力,从空间赛道6支决赛队伍中脱颖而出,荣获一等奖。

科研平台 | 粤港澳大湾区首个低空技术部级平台———“低空智能飞行系统教育部工程研究中心”获批成立
近日,教育部正式批准由44118太阳成城牵头申报的“低空智能飞行系统教育部工程研究中心”立项建设。该中心是粤港澳大湾区首个聚焦低空技术的部级工程研究中心,标志着区域低空经济创新平台建设迈出关键一步。
科研成果 | 飞行器动力学与控制团队在空间机器人轨迹规划方法研究取得进展
PART1 研究背景与问题挑战 随着航天任务的不断发展,我国对大型空间望远镜、太阳能电池阵列等超大尺度航天结构的在轨组装需求日益迫切。由于此类结构体积与重量巨大,传统的“一次发射、在轨展开”技术已难以满足需求,以空间机器人为核心的“多次发射、在轨装配”模式逐渐成为超大型航天结构建造的重要方向。其中,自由漂浮空间机器人能够在失重环境下完成构件搬运、对准和对接等高精度操作,被视为未来空间在轨组装的关键装备。然而,为保证系统稳定性和结构安全,自由漂浮空间机器人输出力矩受限,装配速度受限、效率较低;若盲目提高运动速度,则导致关节力矩峰值过大,引发姿态偏差、结构振荡甚至装配失稳。现有研究依赖复杂的全局优化算法进行自由漂浮空间机器人的轨迹规划,计算代价高、收敛速度慢,难以满足在轨装配对高效率与高精度的双重要求。因此,如何在力矩受限条件下实现快速、精准且鲁棒的轨迹规划,成为当前空间机器人在轨组装研究的核心问题。
科研成果 | 刘鲁华教授团队在CJA发表成果:再入峰值热流试验轨迹优化的析取规划方法
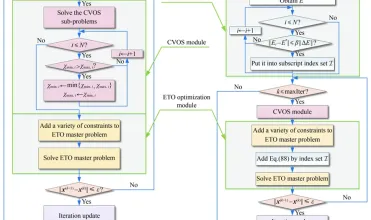
导语 为评估高超声速再入飞行器的热力学性能,需确定满足复杂约束的最大峰值热流轨迹,该问题难点在于峰值热流点对应的时间或能量状态未知。本文基于析取规划理论,研究复杂约束下的“Max-Max”型峰值热流轨迹优化问题,引入“广义航路点”概念,通过逻辑命题推理获得其标准析取范式,拓展了轨迹优化建模思路,提出含组合学先验规则的混合整数非线性规划方法。相较现有方法,所提方法有效减少二值变量数量,显著提高求解精度、效率及稳定性,可为再入飞行器的热试验弹道设计提供理论方法和参考依据。
科研成果 | 胡玲玲教授、周名哲副研究员团队在领域顶刊eTransportation发表最新成果
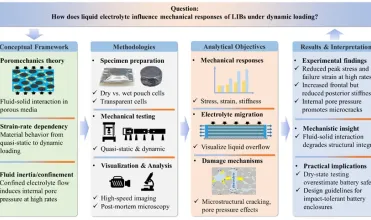
锂离子电池的发明与商业化,极大地推动了便携能源与电动交通的普及。然而,其广泛应用也伴随着严峻的安全挑战——尤其在电动汽车、电动垂直起降飞行器等高速运载工具中,碰撞冲击导致的电池内部结构破坏可能引发内短路,进而触发热失控,对人员安全构成威胁。目前,力学测试仍是探究电池机械完整性与安全边界的主要手段。现有研究大多基于干燥环境或准静态条件,忽略了电解液在实际冲击过程中的关键影响。在多孔电极与隔膜的动态变形过程中,电解液与微结构之间复杂的流固耦合作用影响电池失效行为的机制尚不明确,已成为准确评估电池碰撞安全、设计有效防护措施的核心瓶颈。 图1. 研究内容框架
科研成果 | 杨雪榕教授团队在视觉遥感领域顶刊IEEE TGRS发表论文
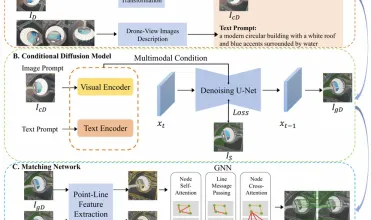
多模态遥感信息融合 + 几何结构特征匹配 赋能 GNSS 拒止城市场景下无人机跨视角定位 无人机的跨视角地理定位任务(Cross-View image Geo-Localization,CVGL)通过将无人机视角的图像与卫星图库进行匹配,以识别目标的地理位置,进而使无人机具备在复杂城市环境中实现目标精准定位的能力。这对无人机完成任务至关重要。其核心之一在于设计不依赖 GNSS、具备跨视角匹配能力的定位框架,使无人机在 GNSS 信号中断或不稳定的城市环境中,仍能保持与 GNSS 正常环境相当的定位能力。然而,无人机航拍视角与卫星俯拍视角存在显著差异,同时无人机飞行高度和拍摄角度的变化会导致同一目标建筑物的视觉外观发生变化,上述因素导致该任务长期面临视角差异大、特征歧义性强的核心挑战。 现有研究主要通过两类策略提升无人机跨视角地理定位性能:

